所屬分類(lèi):手爪係統
產品簡介:手爪係統機(jī)器人(rén)的手爪模塊根據零件的不同而存在較大差異,對於質量較輕(qīng)的軸類和盤類零件常采用氣動手(shǒu)爪…
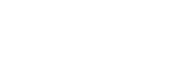
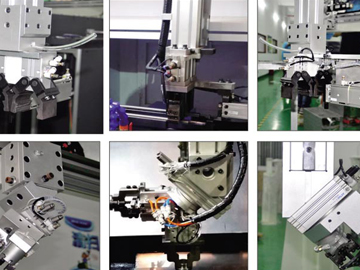
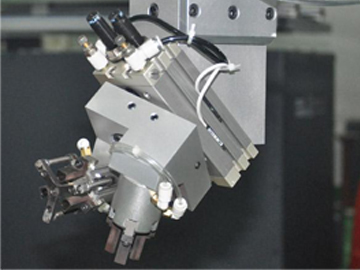
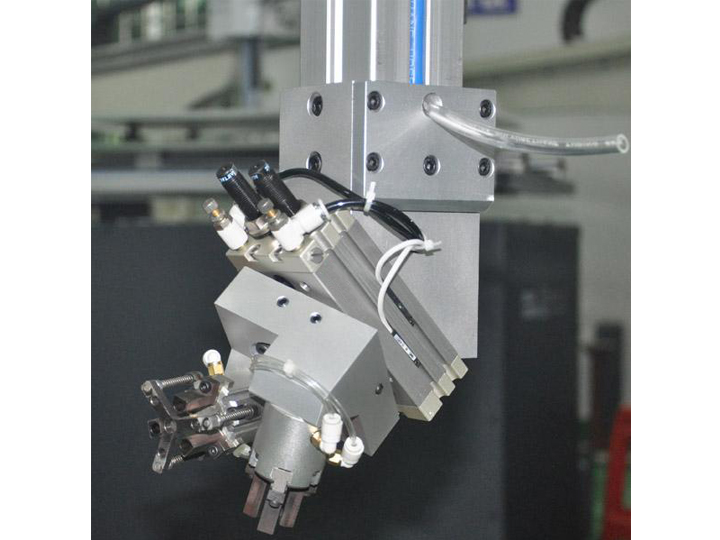
手爪係統
機器人的手爪模(mó)塊根據零件的不同而存在較大差異,對於質量較輕的軸類和盤類零(líng)件常采用氣(qì)動手爪,而對於精度要求高或外形複雜的零件常采用伺服(fú)手爪。根據零件的加工工藝進行選用或定製手爪。
手爪分為:兩爪、三爪、手爪驅動形式分為液壓和啟(qǐ)動,采用知名品牌元件,重量輕,可靠性極高。結(jié)構形式分為,90度,180度。
關節機器人憑借其高靈活性、高精度和(hé)可編程性,已成為工業自(zì)動(dòng)化領域的核心設備,主要應用於(yú)汽車製造、電子裝配、物流倉儲、金屬(shǔ)加…
工業機器人作為自動化生產的核心設備,其(qí)組成結構高度(dù)集成(chéng)化、模塊(kuài)化,通過精密的機械、電氣和控(kòng)製係統協同工作(zuò),實現高效、精(jīng)準的…
工(gōng)業機器人的發展曆史萌芽階段(20世紀40-50年代):第二次世(shì)界大戰後,為解決核試驗中的放射性汙染問題,美國(guó)阿貢國家能源實驗室…
桁架機器人更受歡迎,其應用廣泛性、技術成熟度及市(shì)場接受度均顯著高於三足機器人,具體分析如下:一、應用(yòng)場景與需求匹配度桁架機…
一、發展曆史:從工業應用到醫療(liáo)突破工業領域的起源(20世紀50-80年代)關(guān)節機器人最早誕(dàn)生於工業自動化需(xū)求,以機械(xiè)臂形式應用於…
工業機器人和服務(wù)型(xíng)機器人在用途、設計(jì)、操作方式、應用場景、技術特點及市場潛力等方麵存在顯著區別,具體分析如下:一、用途工業(yè)…