所屬(shǔ)分類:關節機器人
產品簡介:工作原理關節機器人工作原理基於電機驅動和控製係統。電機驅動是(shì)實現機器人運動的關鍵(jiàn),而控製係統則是保證機器人準確執行指令的核心(xīn)。在控製係統方麵,關節機器人通過PLC程序(xù)控製,由控製係統發送指令,通過驅動機構(如液(yè)壓、氣(qì)壓以及電氣等)和(hé)各種傳動機構(如油缸、…
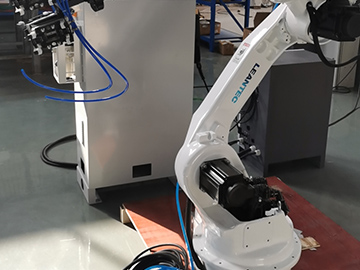
關節機器人工作原理基於(yú)電機驅動和控製係統。電機(jī)驅動是實(shí)現機器人運動的關鍵,而控製(zhì)係統則是保證機器(qì)人準確執行(háng)指(zhǐ)令的核心。
在控(kòng)製係統(tǒng)方麵,關節機器人通過PLC程序控製,由控製係統發送指令,通過驅動機構(如液壓(yā)、氣壓以及電氣等)和(hé)各種傳動機構(如油缸、凸輪(lún)機(jī)構、齒輪(lún)齒條機構以及螺旋機構(gòu)等(děng))的相互配(pèi)合,以實現機械手臂關節(jiē)的升降、伸縮、旋轉等各(gè)種複雜運動。同時,控製係統也可以(yǐ)通(tōng)過對電機的(de)控製,使機器人能夠按照預(yù)設的軌跡和速度(dù)進行運動,並(bìng)且實時監測(cè)機器人的(de)位置、速度和加速度(dù)等(děng)信息,實現閉環(huán)控製。
能夠進行高精度的製造工作。由於其關節的精密設計和位置控製的高精度,使得關節機器人(rén)在製造過程中能夠實(shí)現高精度的定位和操作,從而提高(gāo)生產效率和製造(zào)質量。
能夠進行複雜的生產任務。由於其靈活的關節設計和運動控製的高精度,使得關節機器人能夠適應各種複雜的(de)生產環境和生(shēng)產任務,如(rú)在生產線上的裝配、焊接、噴塗、搬(bān)運(yùn)等(děng)環節中(zhōng)表現出色。
關節機器(qì)人的應用還具有提高生產安全性的特點(diǎn)。由於關節機器人是自動化生產(chǎn)工具,能夠減少直接人為操作,降低(dī)人員疲勞和錯誤率(lǜ),從而提高了(le)生產的安全性和(hé)穩定性。
關節機器(qì)人在製造業中的應用提高了生產效率和製造質量,降(jiàng)低了生產(chǎn)成本和風險,同時也(yě)為製造業的自動化和智能化發展帶來了新的機遇和挑戰。
靈(líng)活(huó)性:關節機器人的關節設計使得其具有極高的靈活性,可以(yǐ)輕鬆(sōng)地模擬人類手(shǒu)臂的動作,適應各種複雜的生產環境。這種靈活性使得關(guān)節機器人在裝配、焊接、噴塗、搬運(yùn)等環節中具有顯著的優(yōu)勢。
高效率:關節機器(qì)人可以連續工(gōng)作,大大提高了(le)生產效率。同時,由於其準確的定位和操(cāo)作,可以減少生產過程中的誤差,提高產(chǎn)品質(zhì)量。
降低成本:使用關節機器人可以降低勞動力成(chéng)本,同時減少人為因素對生產過程的影響,提高生(shēng)產(chǎn)的穩定性和可預測性。
安全性:關節機器人嚴(yán)格按照預設的(de)程(chéng)序(xù)進行(háng)操作,減少了人為(wéi)操作的風險。同時,一些先(xiān)進的關節機(jī)器人還配備了多種安全保護措施,如緊急停止功能、安(ān)全區域(yù)設置等,進一步提高了生產(chǎn)的安全性。
遠(yuǎn)程監控和維護:現代關節機器人通常具有遠程監控和維護功能,可以實時傳輸機器(qì)人的工(gōng)作狀態(tài)和故障信息,方便用戶進行遠程維護和故障排除。
總之,關節機器人(rén)在(zài)製造(zào)業中(zhōng)的應用具有高靈活性、高效率、降(jiàng)低成本、高安全性和(hé)遠程(chéng)監控和維護等特點,極大地提高了製造業的生產(chǎn)效率和產品(pǐn)質量,同時也為(wéi)人類創造了許多便利。
關節機器人憑借其高靈活性(xìng)、高精度和可(kě)編程性(xìng),已成為工業自動化(huà)領域的核(hé)心設備,主要應用於汽車製造、電子裝(zhuāng)配、物流倉儲、金屬加…
工業機器人作為自動化生產的核心設備,其(qí)組成(chéng)結構高度集成化(huà)、模塊化,通過精密(mì)的機械、電氣和控製(zhì)係(xì)統協同工作,實現高效、精準的…
工業(yè)機器人的發展曆(lì)史萌芽階段(20世紀40-50年代):第二次世界大(dà)戰後,為(wéi)解(jiě)決核試驗中的放射性汙染問題,美國阿貢國家能源實驗室…
桁架(jià)機器人更受歡迎,其應用廣泛性、技術成熟度及市場接受度(dù)均顯著高於三足機器人,具體分析如下:一、應用場景與需求匹配度桁架機(jī)…
一、發展(zhǎn)曆史(shǐ):從(cóng)工業(yè)應用到醫療突破(pò)工業領域的起源(yuán)(20世紀(jì)50-80年代)關節(jiē)機器人最早誕生於工業自動化需求,以機械臂形(xíng)式(shì)應用於…
工業機器(qì)人和服務(wù)型機器人在用途、設計、操作方式、應用場景、技術特點及市場潛力等方麵存在顯著(zhe)區別,具體分析如下:一、用(yòng)途工業…